Ingranaggi elettronici, sfasamento e compensazione del gioco degli ingranaggi
Vedi il BasicMotion_SynchronizedMotion.project esempio nella directory di installazione di CODESYS Sotto ..\CODESYS SoftMotion\Examples.
Questo esempio mostra come utilizzare un riduttore elettronico in combinazione con uno sfasamento e una compensazione del gioco degli ingranaggi.
Struttura dell'applicazione
L'applicazione consiste in una semplice macchina a stati nel formato PLC_PRG programma e una traccia che può essere utilizzata per monitorare facilmente la funzionalità dei blocchi funzione.
Abilitare gli assi con
MC_Power.(STATE_POWER)Avviare i movimenti sincroni e spostare l'asse master in modo continuo tra la posizione 0 e la posizione 100 (
STATE_COMMAND_POS_0ESTATE_COMMAND_POS_1).
Utilizzo
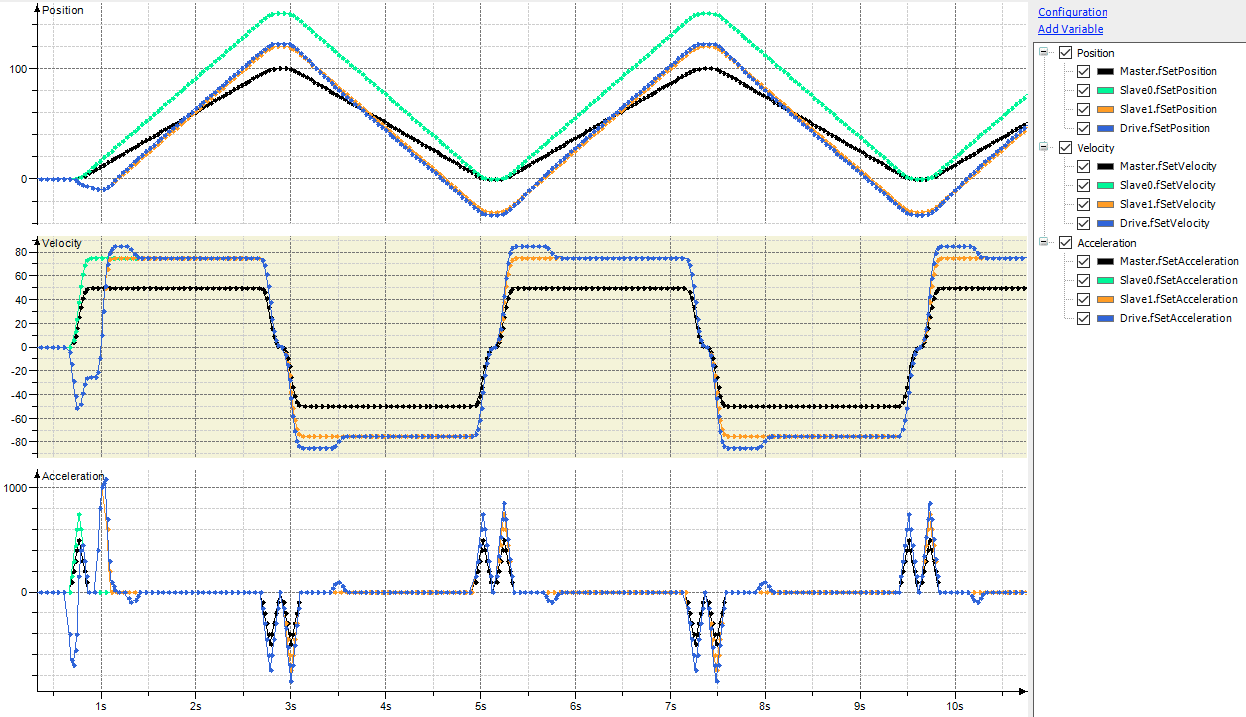
L'asse principale (nero nel diagramma della traccia) si muove continuamente avanti e indietro tra la posizione 0 e la posizione 100 ad una velocità massima di 50 unità al secondo.
Un cambio elettronico (MC_GearIn) con un rapporto di trasmissione di 2:3 converte il movimento principale in Slave0 asse (verde nel diagramma della traccia). La velocità massima risultante dagli ingranaggi è di 75 unità al secondo.
Quindi, uno sfasamento (MC_Phasing) di 30 unità si applica al Slave1 asse (arancione nel diagramma della traccia). La velocità è identica a Slave0 asse, ad eccezione della fase di rampa-in.
Infine, la compensazione del gioco degli ingranaggi viene utilizzata per portare il movimento al limite massimo Drive asse (blu nel diagramma della traccia). A scopo dimostrativo per il gioco degli ingranaggi è stato impostato un valore irrealisticamente elevato di 5 unità. Il diagramma mostra un movimento di compensazione all'inizio del movimento e ad ogni inversione della direzione del movimento.